| <<トップへ戻る>> | ||||||||
| ◇2013年9月7日 L3GD20(ジャイロセンサ)を使ってみました | ||||||||
| 1年間以上更新していませんでした。 この間は、今までに作った物の、基板・ソフト・ハードの一部を変更して遊んでいました。 基板部の変更では、最近はPIC18F14K22を使っています。IOピンをフルに使うことが出来、値段も安く速度も速いので重宝しています。 次に慣性ロータの駆動に使用しているステッピングモータの変更で、以前はギヤ比が18:1のSPG20-1362を使用していたのですが、現在はギヤ比24:1のSPG20-1332を使っています。ギヤの遊びが少なくなり良い感じだと思います。 (SPG20-1332は残念ながら、秋月電子での販売は終了したみたいです。) それと、今までに作った倒立振子ロボットのソフト改良色々としていました。改良の成果が一番出たのは、一輪車ロボットだと思います。改良で安定度が増し、電池の設置場所を変更できました。見た目が良くなったと個人的に思っています。 |
||||||||
|
||||||||
|
||||||||
|
||||||||
| ◇2014年2月2日 ライントレーサ | ||||||||
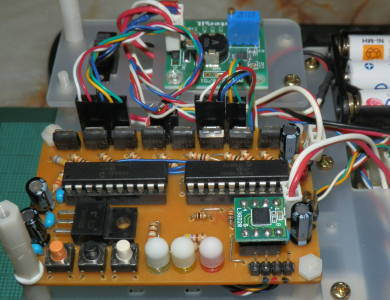
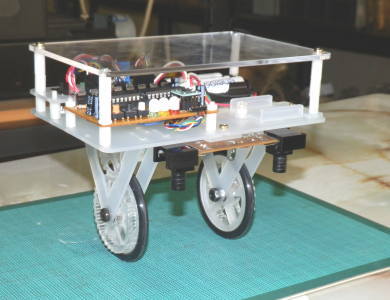
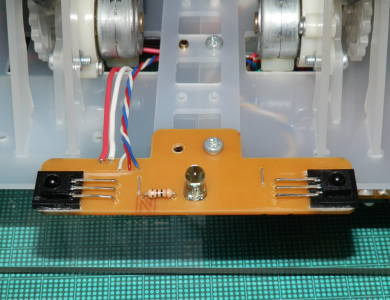
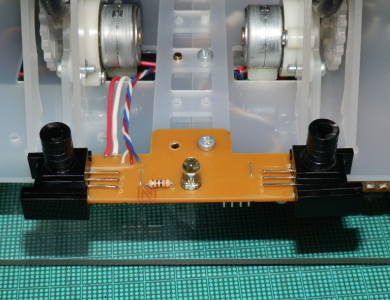
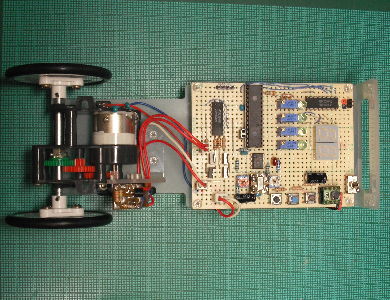
| 前から作りたいと思っていた、倒立2輪車のライントレーサを作ってみました。車体は、一輪車ロボットの車体2台分を利用しています。モータは余っているSPG20-1362に変更しています。 制御基板はL3GD20ジャイロセンサを利用した一輪車ロボットと同じ構成です。自転車ロボットでも使用できるようにユニバーサル基板のCタイプと同じサイズで作っています。 ライン判定に赤外線リモコン受信モジュールを使用してみました。理由は、出来るだけライン判定モジュールを高い位置にし、見た目でもはっきりと2輪だけで動いているのが分かるようにしたかった為と、良く利用されているフォトトランジスタだと、予定外の赤外線を見分ける処理等が必要になるので、手抜きが出来るかなとも考えました。 作ってみて分かった事は、この赤外線リモコン受信モジュールでは速い速度のライントレーサには利用出来ないことが理解できました。最初は赤外線LEDを38KHzで単純に点滅させれば受信モジュールが反応し続けると思っていたのですが数秒で受信モジュールは反応しなくなりました。色々と試してみたところ、20ms以内の周期でのON-OFFだと、外乱と判定し受信が停止するようでした。よってラインの判定間隔を20ms以上にする必要がありました。今回のように遅い速度であれば良いのですが、高速だと20ms間隔では線を判定できないと思います。 あと、ライントレースをしていない時は、赤外線リモコン受信無ジュールを使用し、テレビリモコンからの指示で動く機能も付けてみました。(手抜きで作っているのでソニーのリモコン限定です。) |
||||||||
|
||||||||
| |
||||||||
| ◇2014年3月3日 またまたライントレース | ||||||||
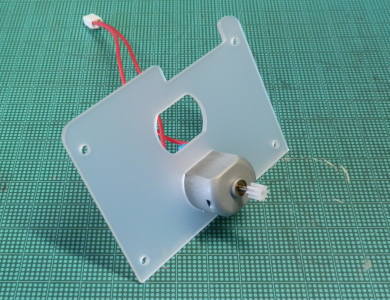
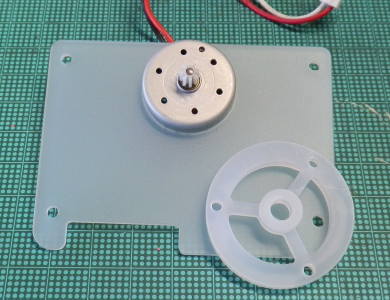
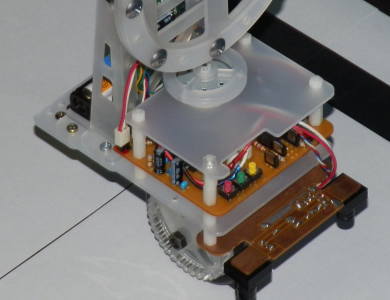
| 一輪車ロボットの方向転換に挑戦してみました。前から方向転換には興味が有ったのですが、一輪車ロボットは横方向の外乱に弱く、無理だろうと半分諦めていました。 しかし、如何しても気になり実際に挑戦し、無理だと分かれば諦めがつくだろうと思い軽い気持ちで開始しました。 旋回方法は、水平方向にロータを設置し、ロータの加減速で発生する力を利用する方法にしました。ムラタセイコちゃんと同様な方法です。 ネットで見つけた他の方法として、これはプロペラを利用して旋回しています。面白いです。 特に感動したのは、愛知工業大学 渡辺研究室でつくられた一輪車ロボットです。トップページで紹介されている「一輪車のマニューバ」動画では綺麗に方向転換をしています。本体を傾けタイヤのバンク角を利用し方向を変えていのだと思います。私も真似て最初から錘を載せ車体を少し傾けて倒立後、前進させてみたのですが方向は変わりませんでした。私の一輪車ロボットではタイヤが細いせいかバンク角を利用できていない様に感じました。 まずはマブチモータのFA-130を使った簡単な部品を作りました。モータには出来るだけ柔らかく軽い銅線を長く付けて単体で回るようにしてテストしてみました。一輪車ロボットを倒立させ状態でこのモータを回転してみたところ、やはり簡単に倒れてしまいます。 何回か繰り返して見て分かった事は、倒れる一番の原因はモータの振動のように思われました。モータの振動がジャイロセンサの値に含まれる為、制御が難しく成っているようです。タイヤで倒立制御している前後方向は何とか成っているのですが、慣性ロータを使用している横方向は振動の為、簡単に倒立制御が破綻しているようでした。横方向は特に本体傾斜角度が重要なのですが、私の考えた角度補正プログラムでは、振動で簡単に角度が狂っているようです。 振動が少なく安いモータは無いかなと何日か悩んでいました。色々とモータを探している時に、ソーラーモータが気になりました。ソーラモータは省電力で動くと言うことは、精度がよくて振動も少ないのではと考え購入してみました。購入したモータはタミヤ模型の「ソーラーモーター03」です。 このモータはFA-130に比べて振動が少なく、これで実験を行ってみました。前回作った基板にDCモータを動かす為のHブリッジを追加したものを作りました。 ある程度、方向転換に目処が付いたので、ライントレース機能を追加してみました。ライン検出方法は、前回作った物と同様な方法で行っています。 移動速度は遅いですが、最初の挑戦としては、そこそこ満足しています。 動きが遅いので動画が長くなっています。最後まで見てくれる人は少ないと思いますが・・・ |
||||||||
|
||||||||
| |
||||||||
| ◇2014年8月26日 面白いかな? | ||||||||
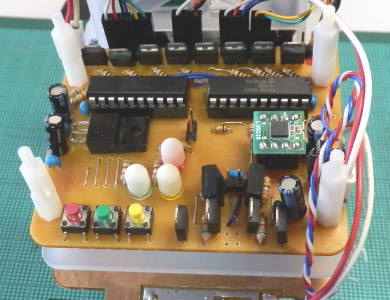
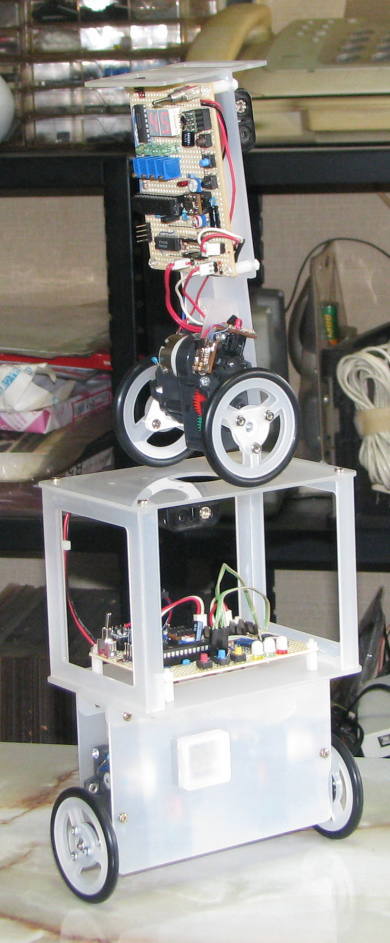
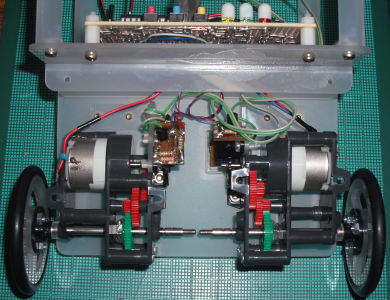
| 2年前に作りかけていた2軸の倒立振子ロボットを動くようにしてみました。このロボットはタミヤのハイパワーギヤーボックスを2個使っています。モータのエンコーダ部のテスト用に1軸で動く倒立ロボットは2年前に作り、動作が確認できた所で、2軸版のロボットを作りかけたところで作業が止まっていました。 主な部品は、1軸2軸共通で以下の通りです。 マイコン---------PIC18F26K22 エンコーダ-------通過型フォトインタラプタCNZ1023 ジャイロセンサ---ENC-03R ギヤボックス-----ハイパワーギヤーボックスHE(タミヤ) 昇圧モジュール--昇圧型DC-DCコンバータ5V0.2A出力(秋月電子) 電源-----------単三電池×2本 プログラムは1軸2軸とも慣性ロータ版の倒立ロボットで考えた本体角度の補正方法を応用した仕組みにしてみました。 2軸版の稼働時間は、単三エナループ2本・移動無しの状態で、驚きの8時間40分でした。 何となく2軸版の上に1軸版のロボットを乗せたところ、幅も丁度良く乗せることが出来ました。それぞれのロボットの進行方向が違うので、実は大した事は無いのですが、それなりに面白いと思います。動画も撮りましたので見てください。 |
||||||||
|
||||||||
| ロボットの移動には赤外線テレビリモコンを使用しています。 | ||||||||
| <<トップへ戻る>> |