| <<トップへ戻る>> | ||||||||||||||||||||||||||
| ◇2011年2月13日 ご紹介 | ||||||||||||||||||||||||||
| 1月の下旬に、とある方から、私のHPを見た感想を頂きました。この方も、これから秋葉原に出かけて部品を購入し、倒立2輪車を作成するとの事でした。 昨日、ある程度出来上がったと、連絡を頂き動画を拝見しました。素晴らしい出来上がりです。倒立2輪車を作成している方ならば、解ると思うのですが、モータのエンコーダ装置無しで綺麗な倒立をしています。速度・移動量はモータにかける電圧,その電圧の積分で推定しているそうです。 |
||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
| あと、この製作者の名誉のために言っておきますが、私は製作等のアドバイス等は一切行っていません。頂いたメールのお礼は書きましたがそれだけです。私の方が色々と参考にさせて貰いたいと思います。 今後の予定と言うか、挑戦したいことは、前に作りかけた慣性ロータ版の倒立振子の完成度を上げたいと思っているのですが、なかなか難しいです。あと、もう少し大きい倒立2輪車を作ってみたいとも思っています。 |
||||||||||||||||||||||||||
| ◇2011年5月22日 試行錯誤 | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ジャイロセンサ回路の変更により安定した倒立2輪車 | ||||||||||||||||||||||||||
| ◇2011年6月5日 不思議な現象 | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ◇2011年6月11日 製作中 | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ◇2011年6月19日 不倒停止かな? | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| あと、ベアリングは、昔遊んでいたラジコン用の工具箱に転がっていた物を使用しました。 今回、新たに購入したの物はウエイト代わりのネジ(4mm)と車軸のネジ(5mm)、タイヤのOリングを近所のホームセンタで購入しただけですみました。 ある程度満足の出来るものが出来たので動画も載せておきます。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ◇2011年7月10日 変なおじさん | ||||||||||||||||||||||||||
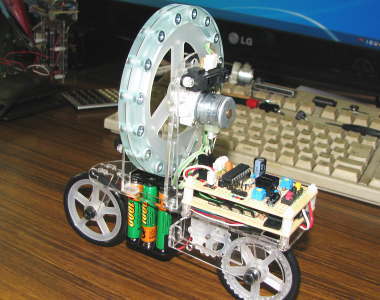
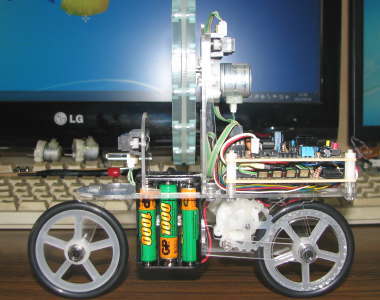
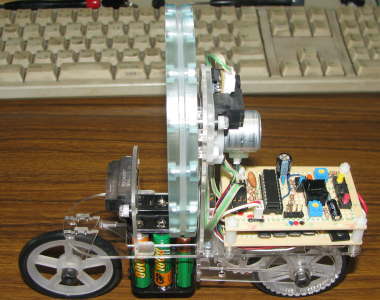
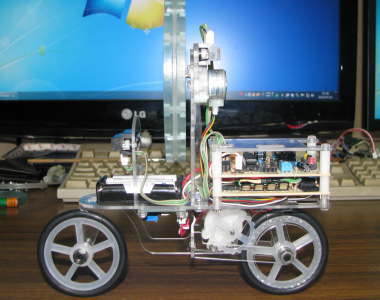
| Make:Japanで紹介して頂き、動画・HPともアクセスが一時的にでしょうが増えました。有難う御座います。 私の周りでも20人弱に見せたのですが・・・・ 20%---スゴーイ!面白と純粋に喜ぶ 50%---凄いけど、またこんな物を作ってと、変なおじさん度がアップ 30%---ふーん!無関心 まあ、こんな感じです。 話は変わりますが先週、秋月電子のHPで私の為に作ってくれたような、DC/DCコンバータに出会いました。欲しい部品も他に有ったので早速通販で購入しました。 このDC/DCコンバータを使用し、単四電池3本で自転車型ロボットを動かすように改造してみました。あと、慣性ロータ用のモータも前後移動に利用していたモータと同じSPS20-1362にしています。モータのトルクが少し小さくなった為、慣性ロータを少し軽くしています。 この変更後も、動きは今までと同様、なんとか安定して動いています。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
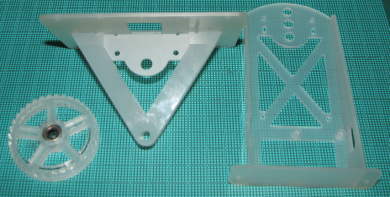
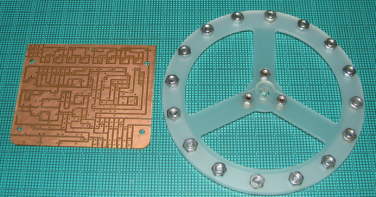
| ◇2011年9月4日 やっぱり挑戦したい! | ||||||||||||||||||||||||||
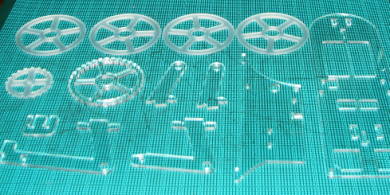
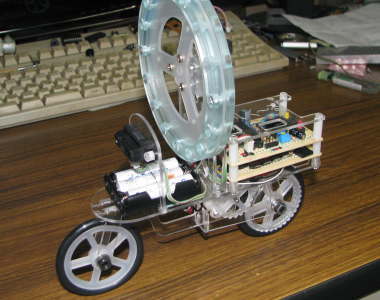
| 私とすれば満足できるムラタセイサク君モドキが物が出来ました。ここまで来たら、ムラタセイコちゃんモドキにも挑戦をしてみたいと思います。 まず、タイヤ周りの構造を色々と考えてみたのですが、良い案が浮かびません。しかたないので自転車タイプと同様なギヤを利用することにしました。 次に、この構造で倒立する為の十分なトルクを得ることが出来るか悩んだのですが、悩んでも私には答えを得る頭はありません。 と、言うことでテストで、それらしい本体を作ってみました。見た目は良いのですが動くでしょうか? ちなみに、YouTubeで”unicycle robot”で検索すると、慣性ロータを利用した一輪車ロボットを何点か見ることが出来ます。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
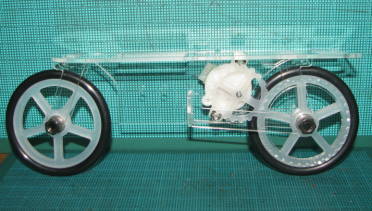
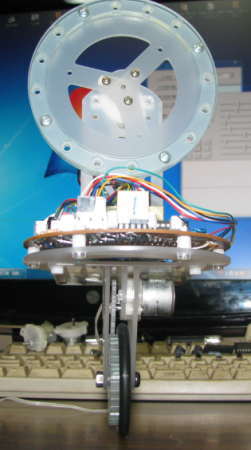
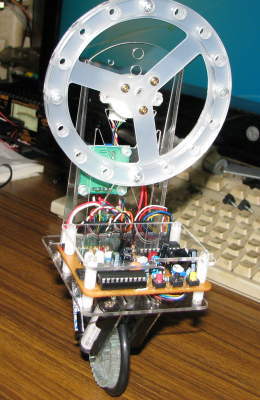
| ◇2011年9月8日 一輪車、大地に立つ!! | ||||||||||||||||||||||||||
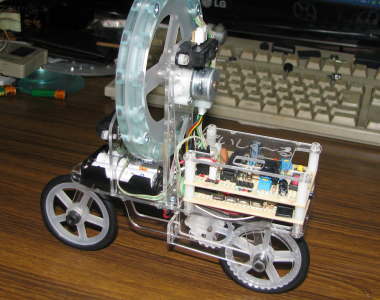
| 玉乗りロボット2号の制御基板を使用し、仮のプログラムを作成してテストしています。この基板はジャイロセンサが2つ載っていて、ステッピングモータも3つ動かすことが出来、都合が良いのです。 気になっていた自作ギヤでの前後移動は、利用可能と思われる動きが出来ていると思います。 色々とまだ問題も有るのですが、慣性ロータで左右方向、タイヤで前後方向の制御を同時に行い動かして見たところ、何とか成りそう動きはしています。下の写真撮影の時間ぐらいは倒立しています。 次は、一輪車専用の基板を作成して、同様なテストを行ってみたいと考えています。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
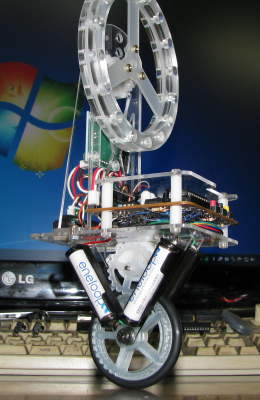
| ◇2011年9月18日 一輪車型の倒立振子ロボット | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
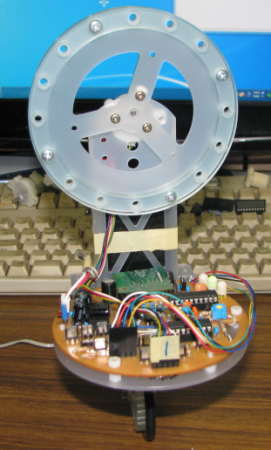
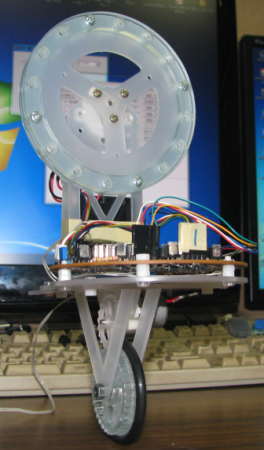
| 電源は、単四電池3本を秋月電子の昇圧型DC/DCコンバータで7.5Vに昇圧しています。 まだ、色々と試行錯誤の最中ですが、動画をアップしてみました。 今回の倒立制御も、専門知識の有る人から見ると性能は大したことは無いと思います。実際、左右方向の外乱には非常に弱いでし、安定して長時間の稼動も難しいです。 しかし、自己満足ですが5千円程度の部品代で、ここまで出来ている事は少しは誇れるのではと・・・・・・? |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ◇2011年10月5日 電子工作コンテスト | ||||||||||||||||||||||||||
| 電子工作コンテスト2011が始まっています。今年は大震災があり無理かなと思っていましたが良かったです。 去年は運良く、最終ノミネートから審査員特別賞まで頂き驚きの結果でした。 今年もコンテストに参加しようと思い先ほど、玉乗りロボットの二番煎じですが自転車型ロボットで申し込みしました。 一輪車ロボットでも応募をしようと思っています。もう少しプログラム等を煮詰めることが出来れば良いのですが。 今回の2作品もムラタセイサク君・セイコちゃんの模倣でオリジナリティは皆無ですが、良い意味での「車輪の再発明」と思ってもらえれば良いのですが・・・・・。 写真ネタが無いのは寂しいので、私の家に迷い込んだ動物の写真を貼っておきます。田舎です。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| ◇2011年11月6日 少し機能アップ? | ||||||||||||||||||||||||||
| 一輪車ロボッットのジャイロセンサ周辺を少し変更して色々とテストしてみました。何をしたかと言うとジャイロセンサで求めた値をオペアンプで増幅しているのですが、その増幅倍率を変更してみました。回路変更に合わせてプログラムも変更しています。 あと、細かなタイミング等を色々と変更して見ました。 結果、動きが良くなった気もするのですが、イマイチ自信がありません。 変更前の状態と並べて見る事が出来れば、少しは役に立つかなと思い、もう一台分のパーツも作りかけて入るのですが・・・・・・ただ今、放置状態になっています。 これ以上の、機能アップは直ぐには無理そうなので、電子工作コンテス2011ト用の動画を作ってみました。 既に応募している動画と合わせて、載せておきます。 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| 自転車型ロボット ばいしく〜る | ||||||||||||||||||||||||||
| 一輪車ロボット おっとっと | ||||||||||||||||||||||||||
| ◇2011年12月7日 ばんざ〜い | ||||||||||||||||||||||||||
| 電子工作コンテスト2011に応募していた2作品が、どちらもノミネートされました。その内「一輪車ロボット おっとっと」は、なんと去年に続き大賞候補の6作品の1つとしてノミネートされました。 実は12/3の夜には大賞ノミネートの連絡は有ったのですが、この時点では、まだコンテストHPには載っていませんでした。もしかすると連絡間違いだったかなと思っていたのですが、間違いでは無かったようで、嬉しさ爆発です。 日曜日に開催される電子工作フェスティバル2011内で大賞決定戦のプレゼンを行います。去年も同様のプレゼンを行ったのですがボロボロの出来でした。今年は少しは落ち着いて出来れば良いなと思っています。 今回の会場は秋葉原です。見学も無料で多くの作品も展示されるようなので、お近くの方は散歩ついでに立ち寄って見て下さい。因みに私は岡山県在住ですので朝早く出て新幹線での参加予定です。 人生で2回目のプレゼン資料を、これから頑張って作ります。 |
||||||||||||||||||||||||||
| ◇2011年12月13日 結果報告 | ||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
| <<トップへ戻る>> | ||||||||||||||||||||||||||