| <<トップへ戻る>> |
| ◇2010年1月6日 明けましておめでとうございます |
 |
先日(4日)、とある方から、故障した写真の物を頂きました。1999年に発売された初代AIBOです。
持ち帰り、4〜5時間、色々と調べた結果、動かすことが出来ました。動いているAIBOを見ていると、やはり頂くのは申し訳なく思い、持ち主に修理して動くようになった事を伝え、返そうと申し出たのですが、断られてしまいました。AIBO君は大事にさせて頂きます。
まさか初の市販ロボットが”AIBO”に成るとは夢にも思いませんでした!
今年の目標
○倒立2輪車等を使用して各種センサの利用方法の勉強。
○2足ロボットの本体側プログラムをC言語で作成し直す。
|
|
| |
| ◇2010年2月8日 性能アップ? |
 |
倒立2輪車の工作を飽きずに遊んでいます。エンコーダの解像度を上げてみたり、使用しているギヤーボックスのギヤ比を変更したりと、色々としています。
ギヤ比の変更(114対1から38対1)は外力(押す・段差等)に強いところは魅力ですが、静止時の安定が今一悪く悩んでいました。そこで、ギヤーボックス自体の変更を行って見ました。使用したのはタミヤのツインモータギヤーボックスです。このギヤーボックスの58対1を利用したのですが、指定の方法で組んだのではギヤの遊びが大きい為、一部組み方を変えて見ました。結果、そこそこ満足の好く物が出来ました。 |
| 左:旧エンコーダ 右:新エンコーダ |
|
|
|
|
| |
| ◇2010年2月14日 できるかな1 |
 |
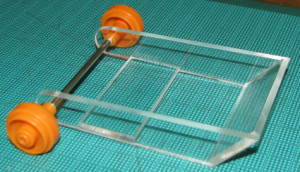
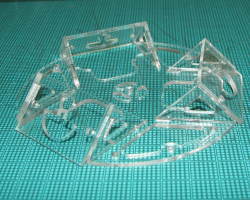
ただ今、こんな物を作っています。CNCフライスが有るので、割と簡単に、ここまでは出来ました。今回は基板もCNCフライスで、久しぶりに作って見ようと思っています。
さあ、思ったように動くものが出来るか、ガラクタが出来るか楽しみです。 |
|
| |
| ◇2010年2月16日 できるかな2 |
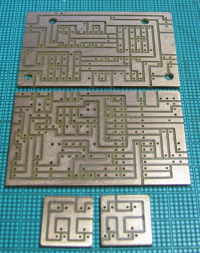 |
CNCフライスで基板を作って見ました。1mmのエンドミルで全ての工程を行いました。少し穴が大きいですが、何とか成ります。
半田作業は如何しても匂いが体に付くので、夕方以降の風呂に入る前に行わなければ成りません。週末までには半田付けを行いたいと思います。 |
|
| |
| ◇2010年2月21日 できるかな3 |
 |
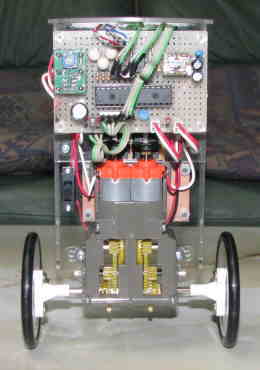
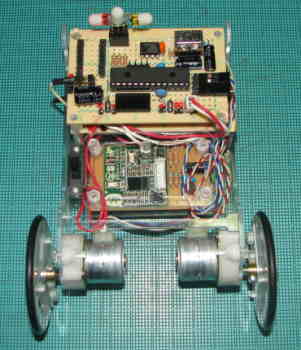
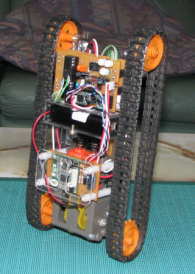
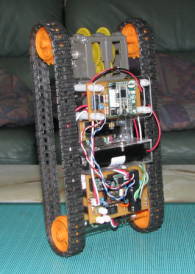
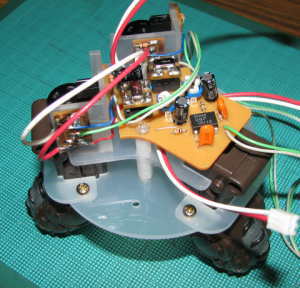
なんとか、ここまで出来ました。ガラクタに成らずに済みそうです。
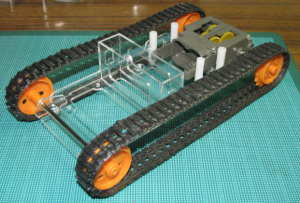
一応、通常走行と倒立走行が可能なキャタピラ車のつもりです。倒立は、上下どちらでも今のところ動いています。
今回の仕組みで新たに追加したのは、加速度センサで倒立時の上下状態を判断できるようにしているところです。
あと、秋月電子の昇圧型DC−DCコンバータを利用して見ました。今のところ問題なく動いています。
ジャイロセンサも何時ものENC-03Rです。古いタイプのENC-03Mでも、問題無く動きました。
もう少し、プログラムの出来が良くなったら、YouTubeに動画を載せたいと思います。 |
 |
 |
|
| |
| ◇2010年2月28日 できるかな4 |
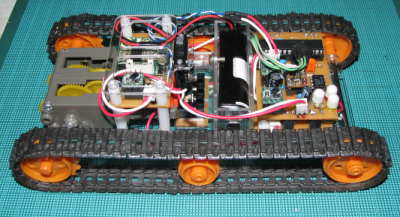 |
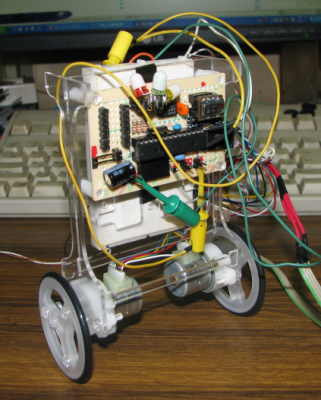
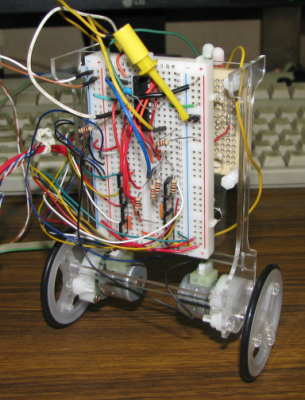
基板にミスがありました。LED用の抵抗が一箇所短絡していました。短絡したLED点灯時に動きが不安定になるので、最初はプログラムミスだと思い色々と調べていたのですが、対象のLEDだけが異常に明るいと思いパターンを見ると短絡でした。
あと、通常走行時の旋回性能が悪かったので、写真の様に車輪を追加しました。結果、床等の平らな所であれば旋回性能は良くなりました。
|
|
|
| |
| ◇2010年3月8日 丸太乗りロボット? |
 |
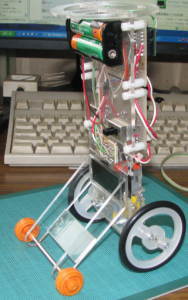
左写真の部品をアクリル板で作りました。これを、モータ1つで前後方向だけに動く倒立2輪車に取り付けました。プログラムを多少変更し、空になった殺虫スプレーに乗せ、写真のように何とか倒立しました。
実は、ボール乗りロボットが作れないかと思い、先ずは前後方向だけの丸太乗りが出来ないことには話しに成らないと考え、試して見たのです。
ボール乗りには駆動部の問題もあるのですが、素人考えなりに挑戦してみたいな〜と思っています。
|
|
|
|
| |
| ◇2010年3月25日 玉乗りロボットに挑戦1 |
 |
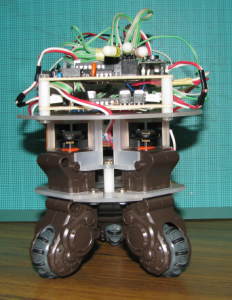
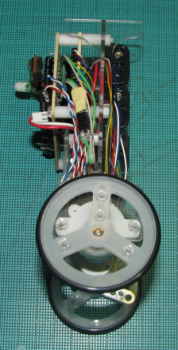
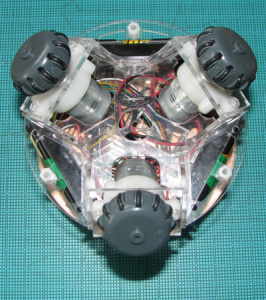
Vstoneロボットショップで格安で販売しているガンローラーを購入しました。このラジコンの脚部を利用して、玉乗りロボットを作ってみようと思います。
LEGOで作られているBallbotの動画を参考にして作っています。
写真は駆動部とジャイロとエンコーダセンサ部まで作った物のです。3脚中モータは2脚だけで1脚はフリー状態です。
上手く動くか未知の状態で制御基盤を作るのは動かなかった場合の精神的ショックが大きいので、倒立2輪車で利用していた基盤を一部手直し搭載予定です。
|
 |
 |
|
| |
| ◇2010年3月28日 玉乗りロボットに挑戦2 |
| 重量 |
325g(電池含む) |
単三電池2本 |
| 高さ |
125mm |
|
| マイコン |
PIC16F886 |
|
| モータ |
タミヤ トルクチューンモータPRO |
2個使用 |
| 脚部 |
京商 ガンローラーの脚 |
モータを変更 |
| センサ |
ジャイロセンサ ENC-03R
エンコーダ GP1A53HRJ00F |
秋月電子で購入 |
| フレーム |
2mmアクリル板 |
|
| 無線部 |
Bluetoothボード(RBT-001) |
週刊マイロボット
42号に付属 |
|
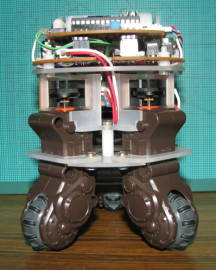
何とか倒立振子制御の玉乗りに成功しました。今までに作った倒立2輪の基盤・プログラムの使いまわしで作ることが出来ました。倒立2輪車との大きな違いは、ジャイロセンサが1つから2つに成った事と、ギヤーボックスがタミヤ製から、ガンローラーの脚に換わった事ぐらいです。
ボールはおもちゃ屋で購入したゴムボールです。空気を多めに入れて硬くしています。
今後の予定は、専用の制御基盤を作成し配線をスッキリさせる事と、プログラムをもう少し煮詰めたいと思います。
|
|
|
|
|
| |
| ◇2010年4月7日 玉乗りロボットに挑戦3 |
 |
先日YouTubeに載せた玉乗りロボットの再生回数が1万回を超えました。大変驚いています。
国内だけでなく海外でも動画の紹介していただいたようです。こんなに嬉しい事は、最初で最後でしょう。YouTubeの解析機能で見て見ると、ドイツ(5000回)と韓国(1000回)からのアクセスが飛びぬけて多かったです。ちなみに、このページからの再生は10回程度でした。
ロボットの方ですが専用の基盤を作って見ました。配線がスッキリし、見た目も少し小さくなりました。
あと、ボールを100円ショップで購入した、発泡スチロールにして見ました。ゴムボールの時より振動が小さくなり此方のほうが良さそうです。大きさは直径100mmと75mmなのですが、どちらにも乗ることが出来ました。
|
|
|
|
| |
| ◇2010年5月5日 動画を追加 |
| この一ケ月は、ネタに成る様な工作は余り無かったのですが、毎日数人のアクセスがあるので動画を追加して見ました。先ず一つ目は、今まで写真だけ載せていた丸太乗りロボットの動画です。 |
|
| 二つ目は、倒立2輪車にスタンドを付け、斜めの状態からの起き上がり動画です。約20度の傾きからの起動です。 |
|
| 最後は、単三電池2本から単四電池2本に変更した玉乗りロボットです。この変更で安定感が増したように感じます。 |
|
今後の予定と言うかやって見たい事は、ステッピングモータの駆動です。秋月電子にある小さなモータが手ごろそうなのでその内に挑戦してみたいです。
あと全然関係ないのですが、DesignWave MAGAZINEの2007年8月号を持っている人はいないでしょうか?特集記事の「事例でマスタする加速度/角速度センサの使い方」を読んで見たいのですが? |
| |
| ◇2010年5月13日 資料を入手しました |
 |
先日、このHPを見た方からDesignWave MAGAZINE 2007年8月を持っていると連絡を頂きました。本日、私の読みたかった特集記事を頂きました。本当に有難うございました。これから、じっくり読みたいと思います。
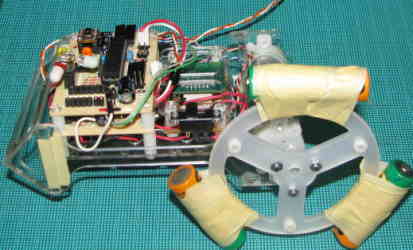
左の写真は、これから作成予定の、ステッピングモータを利用した倒立2輪車です。
ステッピングモータ単体ではPICにつなぎ最低限動かすことは出来たので、倒立2輪への挑戦です。気になるのは、モータのトルクが小さい気がするのですが、動けば儲け物と思い作成して見ます。 |
|
|
| ◇2010年5月20日 倒立しました |
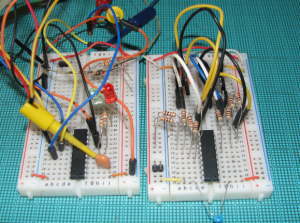
電源は外付け、モータ制御部はブレットボード、メイン基盤は使いまわしのテスト状態ですが、何とか倒立は出来そうです。ただ、ステッピングモータの最大回転速度が遅いの為、外乱には弱いです。
今回は、ステッピングモータの制御用にPIC16F88を使っています。メイン基盤のPIC16F886とはI2Cで繋いでみました。
ステッピングモータ(SPG20-332)、ジャイロセンサ(ENC-03R)、PIC等の主要部品は殆んど秋月電子で調達しています。代金の総額は、今までで作った倒立2輪車で一番安いと思います。
|
 |
 |
|
| |
| ◇2010年6月1日 中間報告 |
 |
左図の構成で今回の倒立2輪は作成しています。プログラムは、まだ色々と試行錯誤をしているのですが、そこそこに動く状態になったので中間報告です。
電源は軽い方が良いと思い、単四電池を6本積んでいます。マイコンの電源もこの電池から3端子レギュレータ(5V)で取っています。
(動かして見て、単三電池6本でも重さ的には問題ない気はします。)
今回、初めてステッピングモータを動かしたのですが、色々と勉強になりました。今後、工作の幅が広がりそうです。 |
|
|
|
|
| |
| ◇2010年6月12日 前準備 |
 |
ステッピングモータ版の2輪車は、プログラムを一部変更し前回より少し動きが安定したように思います。ただし、作った本人にしか判らない程度ですが。
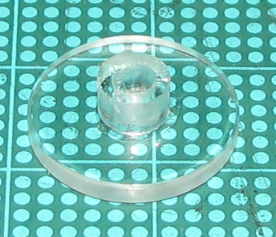
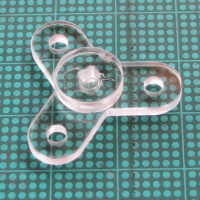
今回は次なる野望の前準備で、ステッピングモータ用のタイヤハブを作って見ました。モータの軸は3mmで左図のD型の形をしています。1mmのエンドミルで作成すると赤丸部分に切り残しが出来る為、青図形のような形で部品を設計しアクリル板で作成して見ました。
直径15mmを2mmのアクリル板で作成、直径5mmは3mmのアクリル板から作成しました。後は実際に2つの部品をモータ軸に固定し、アクリル用の接着剤で接着を行いました。
今回作成したハブは、写真で判る様に、ガンローラのタイヤをステッピングモータで使用する為の部品です。取付け部の遊びも無く、思った以上に上手くできました。
さあ、私は何を作ろうとしているのでしょうか? |
 |
|
|
|
| |
| ◇2010年6月19日 アクリル工作 |
 |
次に作成予定の足回りを、2mmのアクリル板で工作しました。強度が心配でしたが思った以上にしっかりした物が出来ました。このまま使用できそうです。
次回の工作にはPIC18マイコンを利用したいと思っています。現在使用しているPICライタは一部のPIC18しか書き込めない為、PICkit2か3の入手を考えています。多分、ネット上に情報の多そうなPICkit2を購入することに成ると思います。
(秋月電子のPICkit2の在庫も復活しているし良いタイミングかな〜)
|
|
|
|
| |
| ◇2010年6月29日 勉強中? |
 |
秋月電子でPICkit2ライタとPIC18F14K50を購入しました。次回はこのPICを使ってみたいと思います。
まずは、練習でステッピングモータ版の倒立2輪のプログラムをブレッドボード上に作って見ました。
確認できた機能は、
○タイマー割込み・・・・16ビットタイマ割込みの3本同時使用
○I2C通信・・・・マスタからスレーブへの送信
○AD変換・・・・10ビット精度でのデータ取得
○シリアル通信・・・・パソコンとPICのデータ送受信
○EEPROM・・・・EEPROMへのデータ書込み及び読出し
○内部発振での使用・・・・内部発振16MHzでの動作確認
○外部発振での使用・・・・外部発振12MHzで4xPLLを利用し48MHzでの動作確認
ネット上の情報を手助けにして、何とか上記の機能は動くようになったと思います。
あと、単4電池6本を載せることが出来るフレームを2mmアクリル板で作って見ました。
さあ、思ったように動くものが出来るでしょうか? |
 |
|
| |
| ◇2010年7月4日 基板作成 |
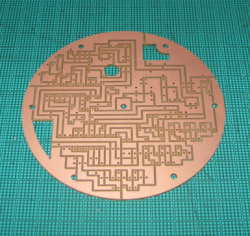
基板をCNCフライスで作成しました。使用したエンドミルは何時もの1mmです。写真の基板は2枚目です。1枚目はFETの配線を間違って作ってしまいました。ジャンパ線での修正も考えたのですが、12箇所全て勘違いのまま作った為、面倒になり作り直しました。あ〜もったいない!
実は2枚目の基板も、間違いがありました。電池電圧を分圧抵抗で監視するつもりでしたが、分圧抵抗の事をスッカリ忘れて作ってしまいました。まあ、無くても機能的に問題は無いのですが一応、空中配線で対応しました。
もう、何を作ろうとしているかは、お気づきだとは思いますが、念の為に言っておくと「新型の玉乗りロボット」です。
構造は「東北学院大学 熊谷研究室」で作成された玉乗りロボット(BallIP)を参考に作っています。
参考動画 (YouTube)
「A robot balancing on a ball / 玉乗りロボット」
「A robot balancing on a ball R1.1 / 玉乗りロボット」
「A Robot That Balances on a Ball」
無謀な挑戦かな〜?
|
|
|
| |
| ◇2010年7月7日 ジャイロセンサが安くなっている! |
新型ロボットはガラクタに成らずに済みそうです。ガンローラーのタイヤだと凹凸が激しすぎて無理かなと思ったり、そもそもプログラムが自体が私に作れるのかと心配していたのですが、写真のように何とか玉乗りが出来ました。
もう少しプログラムを煮詰めたら、動画をYouTubeにアップします。
計測自動制御学会東北支部のHP内に有る、東北学院大学の玉乗りロボットの資料を参考にしました。
○247-3 玉乗りロボットによる搬送に関する研究 (PDFの資料有り)
○254-3 玉乗りロボットの段差乗り越えに関する研究 (PDFの資料有り)
私には理解不可能な数式が多々あったのですが、何とか解かる範囲で参考にさせて頂きました。
あと、秋月電子のジャイロセンサが半額の400円になっていますね〜人気が無いんでしょうか?
反対にVstoneで販売していたガンローラーは約2,000円値上がりして4,935円ですね〜最終在庫なのでしょうか?
|
|
|
| |
| ◇2010年7月10日 馬鹿の一つ覚え |
| 重さ |
320g(電池含む) |
単四電池6本 |
| 大きさ |
車体直径100mm 高さ90mm |
|
| マイコン |
PIC18F14K50 × 2個 |
秋月電子 |
| モータ |
ステッピングモータ
SPG20-332 × 3個 |
秋月電子 |
| センサ |
ジャイロセンサ
村田製作所 ENC-03R × 2個 |
秋月電子 |
| タイヤ |
京商ガンローラーのオムニホイール |
|
| フレーム |
アクリル板2mm |
|
| 通信 |
Bluetoothボード(RBT-001)
又はシリアルケーブル(RS232C) |
BT-MOD100R
と同等品? |
| ボール |
発泡スチロール 直径100mm |
100円ショップ |
|
同じ様な物ばかり作っていますが、まあ、自己満足の趣味ですから良いでしょう。
今回の玉乗りロボットも今までの倒立2輪車と同じくパソコン又は自作コントローラで操作します。パソコンで操作する場合はリアルタイムに各種パラメータを変更でき、角度・角速度等の値をグラフ表示可能です。
最初に作った玉乗りロボットでは旋回動作は運任せでしたが、今回のロボットでは指示して旋回動作が行えます。
あとマイコンの機能分担は、ステッピングモータ版の倒立2輪車と同様に1つはステッピングモータ3つの制御のみを行い、もう1つでメインの倒立制御等の残りの処理を行っています。PIC間はI2C通信です。
|
|
|
|
|
| |
| ◇2010年8月6日 暑い |
 |
ふくよかな体型の私には、連日の暑さは非常に辛いです。
さて、話は変わりますが、パソコンを新調しました。今までのパソコンはPentium4の3GHzでメモリはDDRの1Gbyteでした。6年以上使用していたと思います。途中マザーボードやグラフィックボード(AGPタイプ)が故障し、部品を交換しながら使用していました。
今回購入した物はCPU(Core i3 530)・マザーボード・メモリ(DDR3 2G×2)・DVDドライブ・電源で、約3万円でした。残りの必要な部品は手持ちの物を利用しました。OSはWindows7も考えたのですが現在使用しているWindowsXPに不満があるわけでもないので、OSは手持ちのWindowsXPを使用しました。
動かしてみてCoie iシリーズでは最下位のCPUですが、私には十分の性能です。オンボードグラフィックにもデュアルディスプレイ機能があり満足しています。
玉乗りロボットは、色々とプログラムを変更し少し安定感が増したと思います。旋回動作はプログラムを間違っていたので修正しスムーズに旋回できるようになりました。
今後の予定と言うか挑戦してみたい事は、ムラタセイサクくんやセイコちゃんで使用されている慣性ロータを利用した倒立振子です。まずはネットで情報収集をして見ます。
|
|
|
| |
| ◇2010年8月17日 慣性ロータかな? |
 |
慣性ロータを用いた倒立振子の実験を行っています。
ハード・制御基板とも以前作ったステッピングモータ版の倒立2輪を利用しています。慣性ロータも以前作っていた大径のタイヤに単三電池をテープで括り付けて使用しています。モータとの接続ハブは新規に作成しました。あと、本体が前後に揺れる為の部品を作りました。
プログラムは福岡工業大学河村研究室の慣性ロータを用いた倒立振子の姿勢制御のページを参考にして作っています。最初はまったく倒立する気配が無く、途方に暮れていました。訳も解らず作っているので、当たり前なのですが・・・・
下手な鉄砲数撃ちゃあたるで、慣性ホイールの電池本数を変更し重くしたり軽くしたり、プログラムを色々と変更して何とか、倒立らしき動作をする様になりました。
実験から少し慣性ロータの動きが理解できてきたので、少しプログラムを整理し動画を撮影しました。運がよければ1時間以上倒立しました。大抵の場合は数分で倒れます。
メイン制御 : PIC16F886
モータ制御 : PIC16F88
センサ : ジャイロセンサ(ENC-03R)
モータ : ステッピングモータ(SPG20-332)
電源 : 外部電源(7V) |
 |
|
|
|
|
| |
| ◇2010年10月22日 OSを変更しました。 |
慣性ロータもどきを作っていたのですが、これを作っていく過程で今まで作った倒立2輪・玉乗りロボットの理解不足に気づきました。
倒立2輪・玉乗りロボットとも [角度×定数1 + 角速度×定数2 + 速度×定数3 + 距離×定数4] から求めた値をモータの力としてプログラムしているのですが、この式自体は正しいのですが、私の理解に大きな間違いがある事が分かりました。
そこで問題になったのが、如何して動いているのかと言う事です。私のプログラムでは角度を得る為に角速度を積分して求めています。この方法だと、どうしても誤差が発生し、単純な積分だけでは正しい角度を求めることは出来ません。そこで角度を補正するプログラムを組んでいるのですが、この部分が私の勘違いを上手く吸収し運よく動いている事が分かりました。
こんな事もあり、ここ2ヶ月は、現実逃避行動でOSをWindowsXPからWindows7に変更し遊んでいました。一通り工作の開発環境も動く事が確認が出来たので、今までのプログラムの見直しを始めようと思っています。
あと、電子工作コンテスト2010に参加して見たいな〜と思っています。去年も参加を考えたのですが、倒立2輪自体は決して珍しい物でもなく、参加しませんでした。しかし、賞を狙うのではなく、同じ趣味を持つ人に見て貰えるだけで十分に意義が有ると思いますので、前向きに参加を考えたいと思います。
|
| |
| ◇2010年11月16日 電子工作コンテスト |
 |
日曜日(14日)に電子工作コンテストに応募しました。下手な鉄砲も何とやらで3作品(倒立キャタピラ・玉乗り2機種)応募しました。目標は参加賞の白光株式会社(ステーション式はんだこてFX-888)です。
今使っている物は、写真の40Wの半田ゴテです。最初は家にあった60Wを使用していました。電子工作関連のHPを見てみると、どのHPでも20〜30Wが良いと書いてあったので、初めに20Wの半田ゴテを購入し使用してみました。
しかし、私の腕では満足に半田を溶かす事が出来ず使いこなせませんでした。次に40Wを購入し何とか使うことが出来、今に至ります。
良い道具を使う方がいいのは解っているのですが、なかなか高級な半田ゴテを買う勇気が有りません。 |
|
先ほど電子工作コンテスト(作品紹介)のページが更新されていたのですが、私の工作は載っていませんでした。申し込みが正しく出来ていなかったかなと少し心配です。
他の方の作品を見て、BGMが有る方が良いと思い、応募した動画にはBGMを付けています。
使用しているBGMは「騒音のない世界」のbecoさん作曲の「虹色ウォーカー」です。
工作ネタを少し
昨日、気付いたのですが秋月電子のHPに気になるステッピングモータ(SPG20-1362)が載っていました。HPにはギヤ比24:1と載っていますが参考資料を見てみると18:1が正しいようです。今まで使用していたSPG20-332と大きさ仕様が似ていてSPG20-332よりギヤ比が低くなっているので、速度が稼げそうです。気になるのはギヤ比が落ちた分ステップ数も480から360ステップに減ってしまうので回転の滑らかさが少し失われる点が気になります。それでも気になるので近いうちに購入して使ってみたいと思います。
|
| |
| ◇2010年11月19日 取らぬ狸の皮算用 |
 |
先日、仕事で配管工事を行っている会社に伺った時、塩ビパイプの切れ端を頂いて来ました。時々行く会社で、何時も帰りの運転中に「あ、貰うの忘れた!」状態だったのですが、今回は忘れずに頂いてきました。
このパイプを、今まで殺虫スプレーの空き缶で行っていた、丸太乗りロボットの丸太代わりにしようと思っています。これで見た目も少しは良くなるので、丸太乗りロボットも電子工作コンテストに応募しようかなと思っています。
これも、参加賞の半田ゴテの当選確率を少しでも上げる努力です。 |
|
| |
| ◇2010年11月30日 ノミネート? |
電子工作コンテスト2010に応募していた「玉乗りロボット2号」が大賞候補5作品の1つに選ばれました。12月5日に開催される「電子工作祭り2010」でプレゼンを行い大賞が決定されます。
私自身、今回の様なプレゼンを見たことも無ければ、発表を行った事など有りません。参加を一瞬迷ったのですが、このような機会は2度と無いと思い、恥をかくのは覚悟の上で参加させて頂くことにしました。
これからプレゼン資料作りを始めます。立派な資料は無理でしょうが、楽しみながら頑張ってみたいと思います。 |
| |
| ◇2010年12月7日 審査員特別賞 |
 |
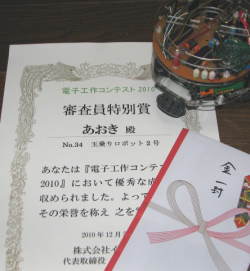
5日に「電子工作祭り2010」内で行われた、最終審査で「玉乗りロボット2号」が審査員特別賞を頂きました。
私のプレゼンはボロボロでしたし、他の受賞作品の発表を見ている時に感じた事は、やはりオリジナル度が重要な審査基準に成っている事です。
私の応募した工作は、基本的に今ある物の焼き直しに過ぎません。正直、甘い期待も有ったのですが、発表が進むうちに「やっぱり、こりゃ駄目だ〜」と思い諦めていました。審査員特別賞で名前が呼ばれた時には、一瞬自分だとは気付かないぐらい驚きました。本当にびっくりでした。
今回、電子工作祭りへの参加を悩んでいたのですが、参加して良かったったと思っています。受賞した事もありますが、趣味を同じくする人に、沢山声をかけて頂けたのは本当に嬉しかったです。私の周りには、見て喜んでくれる人はいますが、「PICマイコンを使っているんですか〜」とかまで解る人は誰もいません。今回はそれが解る人たちに見ていただき、尚且つ色々と話も出来て楽しかったです。正直、時間がもっと欲しかったです。
岡山の片田舎から朝5時に起き6時20分の新幹線で伺ったのですが、苦労の甲斐がありました。
工作祭り終了後、秋葉原の秋月電子に行って、前に書いていたステッピングモータ(SPG20-1362)と在庫が無くなっていたPICやジャイロセンサを購入してきました。思っていたより早くステッピングモータのテストが出来そうです。 |
 |
|
| 審査員特別賞を頂いた「玉乗りロボット2号」 |
|
| 以下は電子工作コンテストに応募した他の工作です。 |
|
|
|
| |
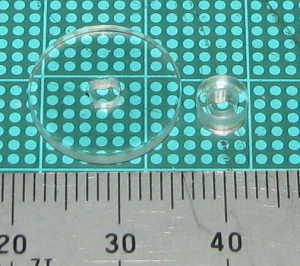
| ◇2010年12月23日 自作オムニホイール |
 |
玉乗りロボットのオムニホイールを作成してみました。今使用しているガンローラーのタイヤでは振動(上下運動)が大きいので、最初は東北学院大学のBallIPのタイヤが作れないかと考えたのですが、私には作れそうにありません。
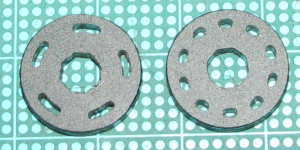
それではとガンローラータイプで少しでも振動が小さくなる様にと小タイヤを増やしたタイヤを作ってみました。ガンローラーの12個から自作オムニホイールは18個にし作成。
タイヤの材料は2mmのアクリル板です。小タイヤの直径は5mmで設計しました。出来上がりのタイヤ直径は32mmです。
小タイヤは写真の様に2つの部品を貼り合わせて作っています。根気の要る作業でした。
ガンローラーのタイヤと、ほぼ同じ大きさで作ったので、プログラム・パラメータ等の変更無く動きました。タイヤによる振動が少なくなり安定度が増しました。
思っていた以上に良い結果が出たので、もう少しプログラムを変更してみようと思います。 |
| 2mmのアクリル板で作成 |
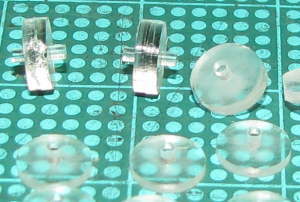 |
| 直径5mmの小タイヤ |
|
 |
 |
 |
| ガンローラーと自作ホイールの比較 |
自作オムニホイール装着 |
大成功! |
|
| |
| |
| <<トップへ戻る>> |