| �����g�b�v�֖߂遄�� |
| �@��2009�N1��20���@���߂Ẵp�\�R�� |
 |
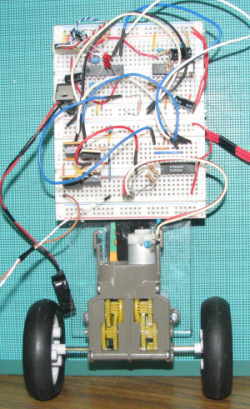
�@�ʐ^�̃p�\�R�������Z����ɏ��߂čw�������p�\�R���uMZ-721�v�ł��B
�@���ł��͂�����o���Ă���̂ł����A�F�l�ƂɗV�тɍs�������A�����Ɂu�R���h�[��VIC-1001�v�ƌ����p�\�R��������A�F�l�͈ꐶ�����ɎG���̃v���O������ł�����ł��܂����B�p�\�R���Ƃ͉����A�ܘ_�v���O�����Ȃǔ����������̂ł����A���̋@�B�Ɍ��������������܂����B
�@�����ɁA�p�\�R���G�����w�����A���������炸�ɎG����ǂ݁A���e�Ƀp�\�R���w�����A���肢���܂����A���ɒl�i����u30���~���炢�v�ƌ����Ƒ��U�Łu����ȍ����������邩�I�v�Ɠ{���Ă��܂��܂����B�����Ȋ肢���Ƃ͎v�����̂ł����A��͂薳���Ȃ��肢�ł����B
�@�������A�@�����Ă��p�\�R�����~�������́A���鎞�A�V���i��89,800�~�̃p�\�R���������܂����B�f�B�X�v���C�͕��ʂ̃e���r�𗘗p���{�̂����Ŏg�p�ł���p�\�R���ł��B����ł���A�������ƃA���o�C�g�ʼn��Ƃ��w���ł���Ǝv���A�ꐶ�����A�����߂čw�����܂����B
�@���̍��A�p�\�R���Ŗ����v���O����������ėV��ł������ɁA��́u���A���̂��炢����������ǂ��̑�w�ł�������Ł`�v�ƌ����A���́u���̂��炢�����A�ʔ��������������`�v�ƌ����āA�u���������茾���ȁI�v�ƁA�悭��ɓ{���Ă��܂����B
|
 |
 |
|
| �@ |
| �@��2009�N1��29���@�|��2�ւɍĒ��� |
 |
�@�����x�݂ɁA�|��2�ւɍĒ�����������Ǝv���Ă����̂ł����A�C�t����1���̏I���ɂȂ��Ă��܂����B
�@���Vstone����i�����|��2�ցuBeauto Balancer�v�����������L����ڂɂ��A��u�w�����l�����̂ł����A������������Ȃ��Ȃ�Ɋ撣���Č��悤�Ǝv�����Ƃ��w�����v���~�܂�܂����B�i�����w�����邱�ƂɁA����Ǝv���܂����E�E�E�j
�@�܂��́A�W���C���Z���T�𗘗p�����A�ԑ̊p�x�̎擾�ɒ���ł��BPIC16F88��AD�ϊ��i10Bit�j�𗘗p���W���C���Z���T�̒l���10ms�Ԋu�ŋ��߂܂��B���߂��l�̓V���A���ʐM�𗘗p���p�\�R���ɑ��M���܂��B
�@�p�\�R���ł��̒l����10�����Ԃ̈ړ��p�x���߁A����ɐϕ����邱�Ƃɂ��A�X�Ίp�x�����W�A���p�ŋ��߂܂��B�ƁA�ȒP�ɏ����Ă��܂����AWeb��̏����Q�l�ɂ��A�l�ꔪ�ꂵ�ĉ��Ƃ������܂ŏo���܂����B���Ƃ��u���W�A���v�ł����A�ǂ��̐������p�x�̓��W�A���Ő������ėL��̂ł����A20�N�ȏ�O�ɍ��Z�̎��Ƃŕ������C�͂���̂ł����A�S���o���Ă��܂���B�i�����A�����͑S�������ł��Ȃ������v���܂��B�j
�@�܂��܂����͎c���Ă���̂ł����A����ȕ����o���܂����B�W���C���Z���T�̒l�����肷��܂ł�3�`5���Ԃ͊|����܂��B���ꂪ�h���t�g���ۂȂ̂ł��傤���H
����ƁA���U���Ă��邤���ɃZ���^�[������Ă��܂��B���Ƃ��ł���̂��H
���ƁA�������́A2�����s���{�b�g�̈�����s�ɂ��𗧂Ă����Ǝv���Ă��܂��B�@ |
 |
|
| �@ |
| �@��2009�N2��11���@1�b�|���H |
 |
�@�O��̉�H�ƃv���O������DC���[�^�֘A�̎d�g�݂�g�ݍ���Ō��܂����B�p�\�R�����烂�[�^�̑��x�E��]�������w���ł��܂��B���ƁA���[�^�̓d���l�����߂�d�g�݂���肽�������̂ł����A�������킩��܂���E�E�E�E
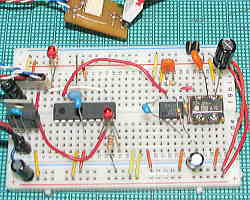
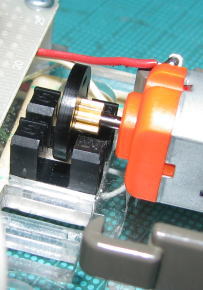
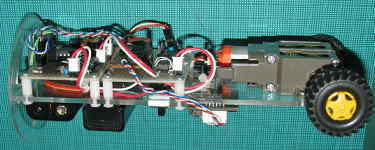
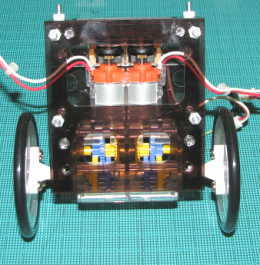
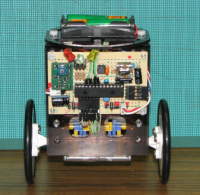
�@�C���]���i���������H�j�ŁA�ʐ^�̕�������Č��܂����B�W���C���Z���T�̒l���V���A������Ńp�\�R���ɑ��M���A�p�\�R���œK���Ƀ��[�^�̑��x�E�������v�Z���A�Q�֎Ԃɑ��M����d�g�݂ł��B
�@�M���[�{�b�N�X�͂P���[�^�œ����悤�Ƀ^�C���̎������ɕύX���Ă��܂��B��H�̓d���̓��[�^�̗��ӂ�Ɋp�^�d�r��z�u���A���[�^�̓d���͊O�t���ł��B
�@���ʂ͂���ȕ��ł��E�E�E�E�E�E�E�H�H�H�H�H�H�H
�@���[�^�̓d���l�͐F�X�ƒ��ׂāA���[�^�ɓd�����o�p��R��t���ė��[�̓d�����ׂ�Ηǂ��ƌ����͉̂��ƂȂ������ł����̂ł����A����̃��[�^�͋t��]������̂ŁA�@���Ȃ��H��g�߂悢�̂����̂Ƃ���T�b�p��������܂���B
�@�܂����ɁA�^�����������A������Ȃ����Ƃ͑�R����܂����A�����������߂��Ɋ撣���Č��悤�Ǝv���܂��B
�@ |
|
| �@ |
| �@��2009�N2��21���@�|�������H |
 |
�@Vston�̓|��2�ւ͎ʐ^���������A�W���C���Z���T�ƁA�^�C���̃G���R�[�_�����œ|�����s���Ă���悤�Ȃ̂Łi�ԈႢ�����m��܂���j�A�d���̑���͌�ɂ��܂����B
�@�|��2�ւŐF�X��HP�����Ă��鎞���uIchiro Maruta Homepage�v������u�|���U��q�v�̃y�[�W���ڂɕt���܂����B�����̓|��2�֎Ԃ͊p���x�݂̂̐���œ|�����s���Ă���Ə����Ă���܂��B�p���x�݂̂̐���ł����ꂾ���Y��ɓ|�����s�����Ƃ��o����Ƃ͋����܂����B����HP�Ɏh�����A�M����E�^�C���E�v���O������ς��ĐF�X�Ɗ撣���Č��܂����B
�@�������ʂ͂����܂ŏo���܂����B����
����ɁA�^�C���̉�]�����擾������ɉ�����A�@�f���炵�����ɐ��邩�ȁH
�@�����̓��ɂ��A���̋Z�p���}�X�^���āAROBO-ONE�̎Q�����i�R���ł���X���[�v���U���������ȁ`�Ɩ����Ă��܂��B |
|
| �@ |
| �@��2009�N3��1���@�^�C���̃G���R�[�h�ɒ��� |
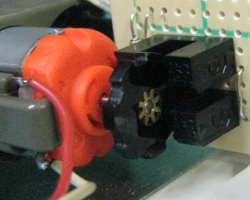 |
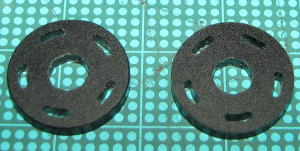
�@���[�^�̉�]���𑪂���@�́APUPPY�U�̃}�l�����Ă��܂��B�^�~���̃g���N�`���[�����[�^�[PRO��CNC�t���C�X�ō�����A�N�������̃G���R�[�_�f�B�X�N�����t���A�H���d�q�ōw�������t�H�g�C���^���v�^�𗘗p����]�������߂Ă��܂��B
�@�|���v���O�����́A�l�b�g��̏����A�F�X�ƎQ�l�ɂ����Ă��炢�A���Ƃ��O�i�E��i�̎w�����s����l�ɂȂ�܂����B
�@�����܂ŏo����ƁA�F�X�Ɨ~���o�Ă��܂����B���������A�|���Q�ւŗV��Ō��悤�Ǝv���܂��B |
|
| �����s����Ȃ��炱���܂ŏo���܂����B���� |
|
|
| �@ |
| �@��2009�N3��12���@������@�̒lj� |
 |
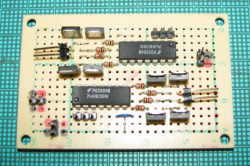
�@���܂ł̓|������́A�W���C���Z���T�l�ƃ��[�^�̉�]�����A2�֎Ԗ{�̂�PIC16F88��10ms�Ԋu�ŋ��߁A�V���A���ʐM�Ńp�\�R���ɑ���A�p�\�R���Ń��[�^��PWM����̃f���[�e�B������߁A2�֎Ԃɑ��M���Ă��܂����B
�@2�����{�b�g�ł����p���Ă���Bluetooth�{�[�h�ŁA�V���A������������Č����̂ł����ABluetooth�{�[�h�̒x���Ǝv����^�C�����O�ŏ�肭�����܂���B�z�����������鎖�����A�����������o����Ηǂ��ȁ`�Ǝv���Ă����̂ł����A�c�O�Ȍ��ʂł����B
�@����APIC16F88�i20MHz�j�ł�10ms�ԂɒP���v�Z��5�����ߓ����̂ŁA���荞�ݏ������̗]���̏������l���Ă��APIC16F88�P�̂œ|������̌v�Z�����ē������Ȃ����ȁ`�ƍl����悤�ɐ���܂����B
�@�p�\�R���ō쐬���Ă���v���O������PIC�ɈڐA����̂ł����A�p�\�R�����̃v���O������ActiveBASIC�𗘗p���A���������_�^�̕ϐ��𗘗p�����v���O�����ł��BPIC�̃A�Z���u���ŕ��������_���v�Z����v���O��������鎩�M���Ȃ��̂ō����C����𗘗p���Č��܂����B
�@���ʂ́A�F�X�Ƌ�J�͂��܂������A���[�^��1�ł���A�p�\�R���ł̐���Ɠ����̓�����PIC16F88�ł��o���܂����B
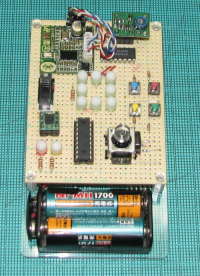
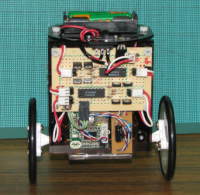
�@�C����ǂ������̂ŁA���j�o�[�T����ʼn�H�����A�ԑ̂��A�N�����ō�蒼���A�d�����S�Ė{�̂ɔz�u���Č��܂����B�S�z���́A���܂Ń��[�^�p�̓d���͏H���d�q�ōw�����Ă���5V��AC�d���𗘗p���Ă����̂ŁA�d�r2�{�œ������ȂƎv���Ă����̂ł����A���Ƃ������Ă��܂��B�@ |
 |
|
 |
 |
 |
 |
| Bluetooth�{�[�h�͏悹�Ă��܂���B |
���[�^�̃G���R�[�_ |
�H���ōw���̃W���C���i���j
���^�Ƃ̈Ⴂ�͊�����ꂸ�B |
|
| �@ |
| �@��2009�N3��19���@���Ȃ钧�� |
|
|
| �d�� |
320���i�d�r�܂ށj |
| ���� |
205mm |
| �� |
105mm |
| �}�C�R�� |
PIC16F88 |
| ���[�^ |
�^�~���@�g���N�`���[�����[�^PRO |
| �M���[ |
�^�~���@�c�C�����[�^�[�M���[�{�b�N�X
�i�P���[�^�œ����悤�Ƀ^�C�����������j |
| �Z���T |
�W���C���Z���TENC-03R
�G���R�[�_�@GP1A53HRJ00F |
| �t���[�� |
3mm�A�N������ |
|
���������܂œ����悤�ɂȂ�܂����B�i�g�ѓd�b���悹�Ă��܂��j����
�@�����܂œ����ƁA���[�^��2�ɂ��ĕ����]�����o����悤�ɂ������ȂƁA�܂��܂����d�Ȗ������Ă��܂��B
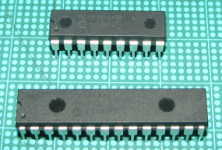
�@�܂ÁA�}�C�R���ł���PIC������PWM�@�\�𗘗p���ă��[�^�����Ă���̂ł����APIC16F88�ł͓���PWM��1�����Ȃ��̂ŁAPIC16F886�𗘗p���悤�Ǝv���Ă��܂��B�{���́A�����ƍ��@�\�ȃ}�C�R���𗘗p����悢�̂ł��傤���A�d�q�H�쏉�S�҂̎��ɂ͏��߂Ďg��PIC16F886�ł��A�傢�Ȃ钛��Ȃ̂ł��B
�@�M���{�b�N�X��PUFFY�U��^���ă^�~���̃_�u���M���{�b�N�X�𗘗p���܂��B�g�ݗ��ĂČ����̂ł����A���̃M���{�b�N�X�ɔ�ׂăM���̗V�т����Ȃ������܂��B
|
|
 |
 |
 |
|
�^�~��
�_�u���M���{�b�N�X |
��@PIC16F88
���@PIC16F886 |
|
| �@ |
| �@��2009�N3��28���@���Ȗ����I |
| �d�� |
385���i�d�r�܂ށj |
| ���� |
240mm |
| �� |
105mm |
| �}�C�R�� |
PIC16F886 |
| ���[�^ |
�^�~���@�g���N�`���[�����[�^PRO |
| �M���[ |
�^�~���@�_�u���M���{�b�N�X |
| �Z���T |
�W���C���Z���TENC-03M
�G���R�[�_�@GP1A53HRJ00F |
| �t���[�� |
3mm�A�N������ |
|
�@2���[�^�d�l�̓|��2�֎Ԃ��A���Ƃ������܂ŏo���܂����B
�@�|������͑S��PIC16F886�ōs���A�|���J�n�E�I���y�шړ��w���̓p�\�R������Bluetooth�ʐM�ōs���Ă��܂��B
�i�����ʼn^�����������𗍂߂Đ����ł���A�������悢�̂ł����E�E�E�E�p�����Ȃ���s���o�����_�ŁA���̂��Ƃ��H�ł��āA�����œ����Ă��邾���ł��B�j
�@����̃M���{�b�N�X�͗V�т����Ȃ��A�Q���[�^�Ńg���N������A�v���������ȏ�Ɉ��肵�Ă���Ǝv���܂��B
|
|
| �����܂��|��邱�Ƃ����X����܂����A����ȓ����ł��B���� |
|
|
 |
 |
 |
 |
| ���[�^�G���R�[�_���i�@1mm�G���h�~���ō쐬 |
 |
 |
| Bluetooth�{�[�h |
2�̃��[�^���g�p |
|
|
|
|
| �@ |
| �@��2009�N4��10���@���z�F�X |
�@����A���e��2�֎Ԃ��������̂ł��������́E�E�E�E
����i���a17�N���܂�j
�@�u�Ӂ`��A���ꂪ���̖��ɂ���ȁ`�`�B�s�G���̕��ł����Ă�Ώ����͖ʔ����̂Ɂ`�v
�����i���a13�N���܂�j
�@�u���N���O�ɏ�����Ă����A���̎d�g�݂��ȁ`�`�v�i�����Z�O�E�F�C�̎����Ǝv���܂��B�j
�@���ɂ����l���Ɍ������̂ł����A�����͔N���ɂȂ�قǁA��߂������ł��B�ȒP�Ɍ����Ɓu����Ȏ����d�����撣��I�v�ƌ����ڂŎ������܂��B�j���͔N��ɊW�Ȃ������Ă����m���������ł��B
�@�����2�֎Ԃ́A��H�}���������ɒ��Ƀu���b�h�{�[�h�Ƀe�X�g��H��g�݁A��������j�o�[�T����ɒu�������܂����B���̔N�ɂȂ�ƁA��͂蕨�o���������Ȃ�A�v���O������g��ł���ƁA���̔z����PIC�̉��ԃs���Ɍq�������ȁ`�ƌ������ƂɂȂ�̂ŁA�䗬�ł͗L��܂����A�ȒP�ȉ�H�}�������Ă݂܂����B�����Đl�l�ɂ������o����l�ȕ��ł͖����͔̂����Ă��܂����A�����X������Έȉ��ɂ����Ēu���܂��B
�����[�^1��1���o�[�W������H�}�iPDF�j�i2009/4/21�����ւ��j
�����[�^2��2���o�[�W������H�}�iPDF�j�i2009/4/21�����ւ��j
�f�l�̏��������̂ł��̂ŁA�g�����ڂŌ��Ă��������B
|
| �@ |
| �@��2009�N4��21���@YouTube�𗘗p���Č��܂����B |
�@�z�[���y�[�W�ɓ�����ڂ���ƁA�����ƌ����ԂɁA�t�@�C���e�ʂ�����߂��ɐ����ė����̂ŁAYouTube�ɍŋ߂̓���3�{�����Č��܂����B�i�摜���N���Ɍ����镪�A���̏�̎U�炩�����悭������p���������ł��ˁ`�j
�@���ƁA��قNjC�t�����̂ł����hBalancing Robot�h�Ō�������Ƒ�R�̓|��2�֓���������邱�Ƃ��o���܂����B
�@�O��̍X�V����̕ύX�_�́A���[�^�p�d�r�̓d�����Ď����A���[�^�̃f���[�e�B��ɔ��f����l�ɂ��Ă݂܂����B��H�}���ύX�������̂ɍ����ւ��Ă��܂��B���ƁA�W���C�p�b�h�ő���ł���悤��PC���̃\�t�g���@�\�lj����܂����B
�i������B�e���Ă���f�W�J�����A���e�����s�Ɏ����Ă����Ă���̂ŁA����ŐV�̓����YouTube�ɃA�b�v�������Ǝv���܂��B�j
�@ |
| �@ |
| �@��2009�N4��23���@YouTube�͖ʔ����ł��ˁ`�@ |
�@������ƒ��߂̓����lj����܂����B����YouTube�̃A�m�e�[�V�����@�\�����p���Č��܂����B�Ȃ��Ȃ��ʔ����@�\�ł��ˁB�F���֗��ɗ��p����C������������܂����B
�@�����A���̓�������̗��p���Ă���T�[�o�ɓ����ƁA���ꂾ���ŗe�ʃI�[�o�ɂȂ��Ă��܂��܂��B |
|
|
| �@ |
| �@��2009�N5��4���@�X�s�[�h�A�b�v |
�@�g�p���Ă���^�~���̃_�u���M���{�b�N�X�́A�M�����4��ނ���I���ł��A���܂ł�114.7�F1�̃M����𗘗p���Ă��܂����B���x��38.2�F1�̃M����ɕύX�����x�A�b�v�����݂��̂ł����A�ᑬ���̃��[�^�g���N���s�����Ă��銴���ŁA���܂��������ł��鑖�s���o�����ɒ��߂Ă��܂����B
�@����A���[�^��PWM������ύX���Č��܂����B���܂ł�PIC��PWM�@�\�𗘗p���A��Ԓx��1220Hz�ŋ쓮���Ă��܂����B���������x��PWM�����ɂ��Č��悤�Ǝv���A�\�t�g��PWM����������Č��܂����B�܂��͊ȒP�ɏo����100Hz�Ń��[�^�����Č����Ƃ���A���[�^�̒ᑬ���̃g���N�A�b�v���o�����C�������̂ōēx38.2�F1�̃M���䒧�킵�Ă݂܂����B
�@�ύX�O�͕b��17cm/s��葬������ƒ�~���ɁA�̐�������ē|��Ă����̂ł����A����͕b��30cm/s�ł����Ƃ��|�ꂸ�ɓ����܂����B
�@���ƁAPWM������x������O�̓��[�^����h�L�[���h�ƍ��������o�Ă����̂ł����APWM������x������ƁA�����o�Ȃ��Ȃ�܂����B
|
|
|
| �@ |
| �@��2009�N7��5���@�v�X�̓d�q�H�� |
 |
�@�v�X�ɔ��c���Ă�����܂����B������A�|��2�փl�^�ł��B
�@���܂ł̓}�C�R���p�̓d���͊p�^�d�r���A3�[�q���M�����[�^��5V�Ɍ������Ďg�p���Ă��܂����B����A�X�g���x���[�E���i�b�N�X��DC-DC�R���o�[�^�𗘗p���A���[�^�p�̒P�O�d�r2�{���珸�����g�p���Č��܂����B�{����DC-DC�R���o�[�^�����삵�����Ǝv���A�F�X�ƃl�b�g�̏������������̂ł����A���̒m�͂ł͓�������̂ŁA�s�k���������w�����܂����B�������A��͂�v������������͓���O�ł����A�g�����肪�ǂ��ł��B����A�F�X�ƃe�X�g���čs�����Ŗ�肪�������邩������܂��A���̂Ƃ�����ɖ������Ă��܂��B
�@���ƁA�����5�����{�ɕύX���Ă����̂ł����A�P���i1���[�^�j�o�[�W�����̃M���{�b�N�X���c�C�����[�^�[�M���[�{�b�N�X�̉����ł���A�^�~���̃V���O���M���{�b�N�X�ɕύX���Ă��܂��B�����̕����M���̗V�т����Ȃ��悤�ŁA�����肵�Ă��܂��B |
|
|
|
| �@ |
| �@��2009�N7��11���@�A���ғ��e�X�g |
 |
�@�O��n�[�h�̕ύX��A1���o�[�W�����̃\�t�g�E�G�A����ɉ��_���ύX�������Ă��܂��B
�@����͒P3�j�b�P�����f�d�r2�{�ŘA���ғ��e�X�g���s���Č��܂����B�ŏ���1���o�[�W���������̃e�X�g���l���Ă����̂ł����A���łȂ̂�2���o�[�W���������킹�ăe�X�g���s���܂����B
��1���o�[�W�����͒P�̂œ������A�ʒu�����ꂽ���́A�^�C����˂����A�����痎���Ȃ��l�Ɉʒu�����܂����B�i30���Ŗ�10�`20cm���ɉ�����܂����B�j
��2���o�[�W�����̈ʒu�C���́A�p�\�R������C���w����Bluetooth�����ōs���܂����B
�@�d�r�́A���ʐ^�̏[�d����g���A���ۂ̏[�d�e�ʂ�1700mA�`1800mA�̓d�r���g�p���܂����B�\�z�ł�1���o�[�W�����́A2���Ԃ͓����Ǝv���Ă����̂ł����A�\�z�����錋�ʂ��o�܂����B
�@�P�X�F�S�T�@�e�X�g�J�n
�@�Q�Q�F�Q�T�@2���o�[�W������~
�@�@�O�F�Q�T�@1���o�[�W������~
�@���ʂ�2���o�[�W������2����40���A1���o�[�W������4����40�����|���𑱂��܂����B4���Ԉȏ�������Ƃ͎v���Ă����Ȃ������̂ŁA�������Ԃ����ɒx���Ȃ��Ă��܂��܂����B |
 |
|
 |
 |
| �Q�Q�F�S�T�@2���o�[�W������~ |
�O�F�Q�T�@1���o�[�W������~ |
|
| �@ |
| �@��2009�N8��28���@���߂��Ɋ撣���Ă��܂� |
 |
�@�O��̍X�V��A���[�^�̉�]�������߂�v���O�����̈ꕔ��ύX���܂����B���̌��ʁA���������ɉ������Ă������삪�����Ȃ�܂����B
�@���ƁA���쒆�ł��ꕔ�p�����[�^�̒l���p�\�R������ύX�ł���悤�ɂ��܂����B���킹�Čv�Z��̌X���A�p���x�A���x�A�ړ������A���[�^��PWM�l����2�֎Ԃ���p�\�R���ɑ��M����d�g�݂�g�ݍ���Ō��܂����B���M���ꂽ�f�[�^�̓��A���^�C���ɃO���t�\���ł���l�ɂ��Č��܂����B
�@�n�[�h�̕ύX�́A2���o�[�W�����ɒP�O�d�r2�{�����ɒlj����܂����B���ʁA�d���̕ω����������Ȃ�A���������肵���悤�Ɏv���܂��B�i����ڑ��Ȃ̂œd�r2�{�ł������܂��B�j
�@�@�@�@ |
 |
|
| �@ |
| �@��2009�N9��13���@�R���g���[�������܂����B |
 |
�@���܂ŁA2���ł̓|��2�֎Ԃ����ꍇ�ABluetooth�ڑ��Ńp�\�R����̃R���g���[���v���O�������g�p���Ă��܂����B2�֎ԂŁA������ƗV�Ԃɂ͏����ʓ|�ł����̂ŁA�R���g���[�����쐬���Č��܂����B
�@�R���g���[�����ɂ��A�T���}�C���{�b�g�ɕt����Bluetooth�{�[�h�iRBT-001�j���g�p���܂����B�Q�l�ɂ����Ă�������̂́uyoneken��blog�v����́uBluetooth���W���[�����S����v�̃y�[�W�ł��B����PIC16F88���g�p���Ă��܂��B
�@Bluetooth�{�[�h���m�̐ڑ��͌��ߑł��ōs���Ă��܂��̂ŁA�R���g���[�����̃v���O�����͎����ĒP���ŁA�ړ��w���̓d�����M�݂̂ł��B
�@������@�́A�W���C�X�e�B�b�N���A�R���g���[�����X���Ĉړ��w�����o�����@�ł��B�X���̌��o�������x�Z���T�𗘗p���Ă��܂��B
�@�����RBT-001�ł����ۏ�͏o���܂������A�}�C�N���e�N�j�J�Ŕ̔�����Ă���BT-MOD100R�Ɠ������̗l�ȋC�����܂��B
�@�@�@�@ |
 |
|
| �@ |
| �@��2009�N10��4���@�~�j�m�[�g�o�b���w�� |
 |
�@���{�b�g�H��ɂ͂��܂�W�Ȃ��b�ł����A�挎�̃V���o�[�E�C�[�N���Ƀ��t���b�V���o�b�i�ȒP�Ɍ����ƒ��Õi�j�̃~�j�m�[�g�o�b���w�����܂����B�w�����NTT-X Store�ŁA�w�������o�b��Aspire one�@AOD150 �ł��B�������݂�23,800�~�ł����B
�@�ŏ��A�̔���̂g�o�Ō����Ƃ��́A�h�����ȁ`�h�Ǝv�������炢�ŁA�w���̈ӎv�͖��������̂ł����A���ƂȂ��X�y�b�N�ꗗ�����Ă���ƁhBluetooth�����h���ڂɗ��܂�܂����B��O�̌^��Aspire one��19,800�~�Ŕ̔�����Ă����̂ł�������ɂ́hbluetooth�h�͓�������Ă��܂���B
�@���̂��}�ɁA�ŋ߂͉��������Ă��Ȃ����A�������ґ�����Ă��������ȁ`�Ǝv���A�w���ӗ~���o�Ă��܂����B���������Ȃ�A�ǂ̐F���D�����Ȃƌ���ƁA4�F�i���E�ԁE���E�j�̓��A���ɐԐF�͊����ł����B�c�O�B
�@�b�͂���܂����A���͐ԐF�D���ŁA�ǂ����q������́u�ԓ���T���v�u���b�h�o�����v�u���C�I�����v�u���{�R���v�u�ԃ����W���[�v�u�Q�b�^�[���{�v���X�̃e���r����̉e�������������Ǝv���܂��B�_�������́u�Ԃ��a���v�ł��傤�B
�@���ƁA������W�Ȃ��b�ł����A�e���r����Ȃ���ŁA�����w�Z����́u�F����̓��}�g�v�́u�X��v�E�u��͓S��999�v�́u���[�e���v�ӂ�Ŏ��̒������l�̒�`���o���オ�����悤�Ɏv���܂��E�E�E�E�E�E�B
�@�b�͖߂��āA�ŏ��͔��̍w�����l���Ă��܂����B���������͖c���F�ł��B���������������p�\�R�����̂�����A�����ł���������������Z���F�ƌ������ƂŁA�F���w�����܂����B���ƃ}�E�X��blutooth�Ή���M-BT2BRBU���w�����܂����B
|
|
| �@ |
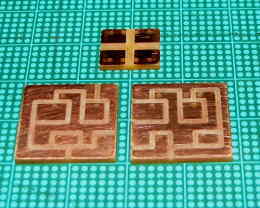
| �@��2009�N10��10���@CNC�t���C�X�̐��x |
 |
�@���̎g�p���Ă���CNC�t���C�X�́A�I���W�i���}�C���h��mini-CNC BLACK1520�ł��B�����A2mm���̃A�N��������2�֎Ԃ̓d�r�{�b�N�X�⏕���i�����܂����B�v�}��ł�57mm�~64mm�̑傫���ł��B
�@���ۂɌv�����Č���Ǝʐ^�̗l�ɁA0.1mm�ȉ��̌덷�ŏo���オ���Ă��܂��B���̌덷��傫���ƌ��邩�������ƌ��邩�͍����̂ɂ���Ĉ���Ă���Ƃ͎v���܂����A���̎�̐��E�ł͏\���߂��鐸�x�ł��B
�i�����̂̑傫���ɂ���ẮA���������傫�Ȍ덷���o��ꍇ������܂��B�j
�@1�����ȏ�w����Y��CNC�t���C�X�ł����A���͔����Ė{���ɗǂ������Ǝv���Ă��܂��B�����w�����Ă��Ȃ���A���{�b�g�쐬�E�d�q�H��̐��E�ɓ��ݍ��ގ��͂Ȃ������ł��傤�B |
| ��57mm�c64mm�Őv |
|
|
| �@ |
| �@��2009�N10��16���@�i��ł͖߂��Ă��܂� |
 |
�@����̓|��2�֎Ԃł����A�F�X�ƕύX�����������A�����Ă����̂ł����A�ꕔ�ύX�O�ɖ߂��Ă���̂ŏ����Ă����܂��B
���M�����38.2�F1����114.7�F1�ɖ߂��܂����B���R�́A�Î~���̈��肪�����ׂł��B
�����[�^��PWM������100Hz����APIC�̓����@�\�ō쐬�ł���1220Hz�ɖ߂��܂����B���R�́A�v�����قǂ��g���N���������Ȃ��Ȃ����ׂł��B
���P�O�d�r��4�{����2�{�ɖ߂��Ă��܂��B���R�́A���p���Ă����ꕔ�̏[�d�d�r�����Ă����̂��C�t�����ɂ����ׂł��B
�@�w��nj��ɖ߂����l�ȋC�����܂����A���s�������Ƃ͎v���Ă��܂���B�悢�o���ɂȂ����Ǝv���܂��B
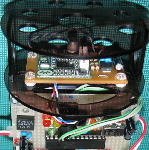
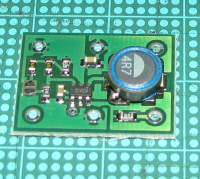
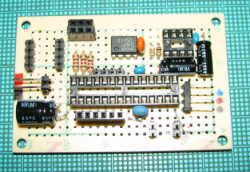
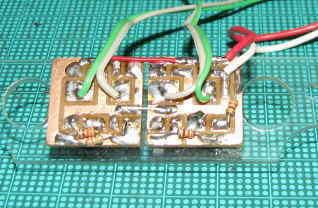
�@�ʐ^�̊�́A3.3V�̓d���œ����\��̃{�[�h�ł��B���܂ł�5V��PIC�����Ă��܂����Bbluetooth�{�[�h��3.3V�ŗ��p���Ă���̂ŁA�d����1�ōςޗ\��ł��B�ibluetooth�{�[�h��3.0V�����z�炵���ł��B�j
�@����ƍ���A�H���d�q�ň����Ă���PIC24F�����p�������Ǝv���A��d���ł̍쐬�ɂ�����Ă������ƍl���Ă��܂��B
�@���̐V����3.3V��ŁA�����w�̒Ⴂ�|��2�֎ԂɁA����\��ł��B���ƁA�o����ΊO��������Č������Ǝv���Ă��܂��B
|
| ���C���{�[�h�iPIC�E�W���C���j |
 |
| ���[�^����{�[�h |
|
| �@ |
| �@��2009�N10��20���@LowType�|��2�֎Ԃ̐i��� |
 |
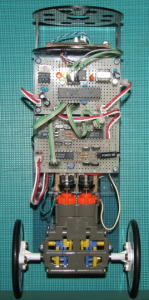
 |
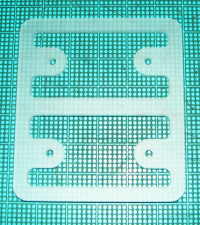
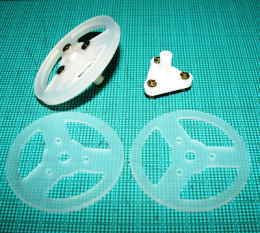
�W���C��(��)�G���R�[�_�i���j�p���
1mm�G���h�~���ō쐬 |
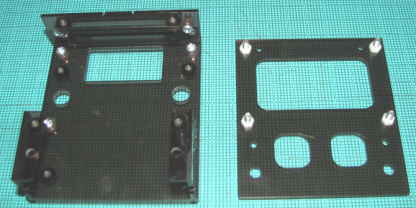
�{�̃t���[���@2mm�A�N�����ō쐬 |
|
 |
 |
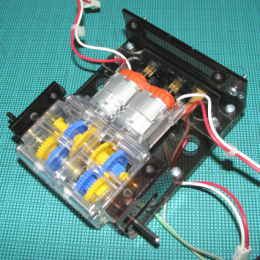
�G���R�[�_���̑g���@�Ԋە��������[�^�̎����i
�̈ꕔ�ɂ�����ׁA��������Ă��܂��B |
�G���R�[�_���̗��� |
|
 |
 |
 |
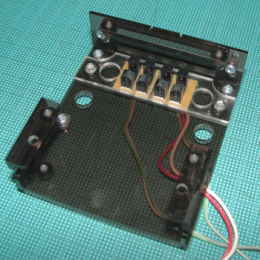
�d�r��t�����@�P4�^�d�r���g�p
2�����{�b�g�Ŏg�p�\��̓d�r��
��ʂɖ��g�p�ȈׁA���p������B |
�^�C���@2mm�A�N�����ō쐬
2�������킹��1�̃^�C���ɂ��܂��B
�Ō��O�����O���A�͂߂Ċ����B |
����2mm�A�N������
�G���R�[�_�p�~�Ղ��쐬�B
1mm�G���h�~�������g�p�B |
|
 |
 |
 |
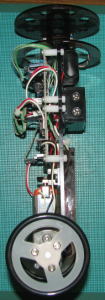
| �t���[���ɃG���R�[�_���̎�t�� |
�M���{�b�N�X�̎�t�� |
�O�ʃt���[���̎�t�� |
|
 |
�@�^�C�������t���āA��܂��Ȍ`�͌����Ă��܂����B�\��ł͖{�̃t���[���̑O��Ɋ�Abluetooth�{�[�h���ڂ���\��ł��B�d�r�͍ŏ㕔�ɍڂ��܂��B
|
|
| �@ |
| �@��2009�N10��26���@�\�蓹���ɂ͍s���܂��� |
 |
�@��͂�d�q�H��f�l�̍l���ʂ�ɂ͍s���܂���ˁ`
�@�ŏ��͗\�蓹����3.3V��őg�ݗ��Ăē������܂����B�v���O������3.3V�p�ɕύX���A�����ɂ͓������̂ł����A���[�^�̃g���N���ア�C�����ă��[�^�̓d���𑪂��Ă݂����1.6V���x�����o�Ă��܂���B
�@����g�p����FET��2SK2415��4V�쓮�ł��B�����ȑ��k�������̂�������܂���B
�@�����A�O�����ău���b�g�{�[�h��ŊȒP�ȃe�X�g�������Ƃ��́A2.2V�ȏ�̓d���鎖���o�����C�������̂ł����E�E�E������x�A���l�ȃe�X�g��������A1.6V���x�����o�Ă��܂���B
�@���̂܂�3.3V�ōs�������Ƃ��v�����̂ł����A����A�O�����l���Ă����̂ŏ����ł��p���[�������������D�����낤�Ǝv���A5V�p�Ɋ��ύX���܂����B�ύX�Ƃ����Ă�LED�p�̒�R��n�����������x�ł��B����ƁAbluetooth�{�[�h�̓d���p��3.3V�̓d������쐬���܂����B
�@���ƁA�R���g���[���̃v���O�������ꕔ�ύX���A�ԃ{�^���������Ȃ���d��������ƐV�^�@�ƃ����N����悤�ɏC�����܂����B
�@�@�@�@
|
 |
 |
|
| �@ |
| �@��2009�N11��14���@�O�������܂��� |
 |
�@��������Ă���l�ɂ͕������ĖႦ��Ǝv���܂��A�l�I�ɂ́A�O���łȂ����g�����ĖႢ�����̂ł��B���������̎���̑唼�͊�������Ă���ƁA�������Ɋ�����悤�ł��B
�@�����ō���A1.2mm��0.5mm�̃^�~���̃v�����g�p���A�O��������Ă݂܂����B�{�̂̃I�����W�F�̓A�N�����J���[�œh���A�͗l�̓J�b�e�B���O�V�[�g�ō쐬���܂����B
�i�{���̓��b�J�[�n�̓h���̕����A�h���������ėǂ��̂ł����莝���ɖ��������ׁA�A�N�����n�ɂȂ�܂����B�j
�@���g�������Ȃ��Ȃ��������ŁA�ʔ��݂͖����̂ł����A�Z���X�̌��Ђ��������ł�����d���Ȃ��ł��B
�@���ƁA�ڂɂ͌����Ȃ������ŁA�ꕔ�v���O�����̒lj����s���܂����B���܂ł͊e��p�����[�^�̒l���ғ����ɕύX�͏o�����̂ł����A�d�����Ə�����Ԃɖ߂��Ă��܂����B����͂ƌ����p�����[�^���o�������́A�v���O�����̏����l��ύX��A�R���p�C����PIC�ɏ������݂��s���Ă��܂����B
�@����̋@�\�lj��Ńp�����[�^�̏����l���APIC������EPPROM����Ǎ��ނ悤�ɂ��܂����B���킹�ăp�\�R�����̃\�t�g���AEPPROM����̓Ǎ��݂Ə��o�����o����悤�ɋ@�\�lj����s���܂����B
����
�@�d���F313���i���O���F48���j�i�d�r�܂ށj
�@�����F135mm
�@���@�F105mm
�@���s�F72mm
�@ |
 |
|
|
|
| �@ |
| �@��2009�N11��29���@�|��2�֎ԁ@�S���W���I |
�@�|��2�֎Ԃ����o���������́A�f�l�H��ł����܂ł̕����o����Ƃ͍l���Ă����܂���ł����B�����܂ŏo����Ɨ~���o����̂ŁA������������ł��Ȃ����̂��Ǝv���o���悤�ɂȂ�܂����B
�@�����ŁA�����x�Z���T�����p���A�W���C���Z���T�ŋ��߂Ă���X�����A��萸�x�悭�擾�o���Ȃ����ƍl���A�e�X�g�I�ɉ����x�Z���T����t���Ă݂܂����B�Z���T�̒l���O���t�\�����Č��A�F�X�ƍl�����̂ł����A���ɂ͉����x�Z���T�̊��p�͖��������ł��B
�@�������A�����ōl�@���ɁA�W���C���Z���T�̃h���t�g���ۂ����Ă���v���O�����́A�ʂ̕��@���l���܂����B�F�X�Ǝ��s����͂������̂ł����A���ڂ͂���������肭�@�\���Ă���悤�Ɍ������̂ŁA�c��2��ɂ����l�ȏ�����lj����e�X�g���Ă݂܂����B
�@���܂ł͐Î~���ɁA�h���t�g���ۂ̕����肭�s���Ȃ��Ȃ�ƁA�O��̓������傫���Ȃ����̂ł����A����̕ύX�ŁA���̕ӂ����肭�Ώ��o�����悤�Ɏv���܂��B
�@���ƁAVstone����Beauto Balancer Duo���������ꂽ�̂�HP�Ō����̂ł����A�������ł��ˁ`�G���R�[�_�������Q�l�ɂȂ�܂����B�������́ANC�t���C�X�̉�]�������߂鎞�ɍ���Ă����̂ł����A���˔�2�i�ɂ�����@�͎v�������܂���ł����B
|
| |
| �@ |
| �@��2009�N12��8���@���ꂵ���o���� |
 |
�@����HP�������L���s�̐l���A�d���ʼn��R�ɗ���p��������̂ŁA����Č������ƃ��[���ŘA�����A���傤�Lj�T�ԑO�ɁA�|��2�ցE2�����{�b�g�����ɗ����܂����B���̕���2�����{�b�g�Ɠ|��2�ւɒ��풆�̂Ƃ̎��ŁA����HP�̓��e�ɋ����������ꂽ�悤�ł����B
�@���b���ƁA2�����{�b�g�͑g���ݗpLINUX�{�[�h�Œ��풆�ŁA�|��2�ւ�R8���g�p�Ƃ̎��ł����B�������CNC�t���C�X�܂ō���Ă����āA�������w�Ɏf�������l�ȕ��ł����B
�i�ʐ^�́A�������|��2�֗p��ł��B�O���ō쐬���ꂽ�����ł��B���ʎ����ɂȂ��Ă��܂��B�j
�@����Ȏ�������A��T���͂��������v���O�����̊����x���グ�悤�Ɗ撣���Ă��܂����B���e�͊����ݏ����Ɋւ��镔���ł��B |
|
���G���R�[�_�����E�E�E���܂ł͖�0.055�����Ԋu�Ń^�C�}�[0�����݂��|���ăG���R�[�_�̕ω����Ď����Ă��܂����B����̕ύX�͂�����APIC��RB�|�[�g�̊����ݏ����ɕύX���܂����B���̏����̕ύX�ɂ͛Ƃ�܂����B�����͑���PIC16F�n�̏����Ɠ��l�ɍl��RB4�`RB�V�|�[�g�������ݏ����\�̃|�[�g�Ǝv���z����ύX���v���O�������Č��܂����B�������@���������ݏ������������܂���B�ŏ��̓n�[�h���^���F�X���ׂČ����̂ł�������܂���BPIC16F886�̃f�[�^�V�[�g�����Ă��������C�����܂��B�����͒��߂܂����B���̓��A�ēx�f�[�^�V�[�g�����Č���ƁA�S�Ă�RB�|�[�g�̐����ɁhIndividually
controlled interrupt-on-change.�h�Ə����Ă���܂��B�����ŁAPIC16F886�͑S�Ă�RB�|�[�g�Ŋ����݉\���ƋC�t���܂����B���Ɋ����ݐ��䃌�W�X�^�iINTCON�j��RB�|�[�g�Ɋւ������������ƕ⑫������IOCB���W�X�^��ݒ肵��Ə����Ă���܂��B���̃��W�X�^�͍��܂ł�PIC16F�n�ɂ͖��������̂ł��̏����������Ă��܂����B���̃��W�X�^�̏��������鎖�ɂ�薳���Ɋ����݂͔������܂����B�p�ꂪ������Ȃ�����2���ԔY�݂܂����B�i�z���͌��ɖ߂��܂����j
��10ms�����E�E�E10ms�Ԋu�œ|��������s���Ă���̂ł����A����10ms�����܂ł̓G���R�[�_������182��s������10ms�Ƃ��ď����ɗ��p���Ă��܂����B����̓^�C�}�[1�𗘗p��10ms�Ŋ����݂��|����悤�ɕύX���܂����B
���V���A����M�����E�E�E2�����{�b�g�쐬���͎�M�������|�[�����O�����Ńf�[�^�̎�肱�ڂ��������o���Ă����̂ł����A�|��2�ւł�1�����̌v�Z���Ԃ������Ȃ�f�[�^�̎�肱�ڂ�������̂ŁA��M�����ݏ����𗘗p���Ă��܂��B�|��2�ւł�1�f�[�^��3�o�C�g�ō���Ă���̂ł����A��M������A3�o�C�g�f�[�^����M���邩�t���[�~���O�E�I�[�o�[�����G���[���������Ȃ��Ə������I���Ȃ��Ȃ��Ă��܂����B������C�����A��M�����ݏ����ł͗��Ă���f�[�^�������捞�݁A1�f�[�^��g�グ�鏈���ɕύX���܂����B���킹�ă^�C���A�E�g�̏������lj����A�f�[�^���Z���ꍇ�͖����ł���悤�ɂ��܂����B
���ꓙ�̏����̂������ŁA1��̌v�Z��5ms�O��|�����Ă������̂��A2ms�O��Ƒ����Ȃ�܂����B |
| �@ |
| �@ |
| �����g�b�v�֖߂遄�� |